
TELEBOT VR – Remote Robot Control via Virtual Reality
TELEBOT VR : Remote robot control through virtual reality enhances operator immersion and efficiency in hazardous environments. Explore how VR and 5G technology revolutionize tele-robotic systems.
The project seeks to narrow the sensory distances encountered by an operator when controlling a robot remotely through simulation and virtual reality interfaces, and to promote vision and control over robotic systems and joints.
Robotics | Maintenance | Remote Systems | Unattended Environments | Virtual Reality | 5G | Critical Infrastructures | Haptic Systems | Simulation | Industry4.0
What is TELEBOT VR?
The project explores several technological lines:
- Haptic systems
- Computer vision techniques and vSLAM
- Virtual reality and immersive virtual reality
- Stereoscopic and hyperspectral camera systems.
- 3D reconstruction and 5Gtechnologies for communications.
On the one hand, the aim is to explore the use of virtual reality as an immersive interface method for the control of tele-robotic systems and for remote visualization of the operator in a highly immersive way.
On the other hand, the application of hyperspectral cameras for the analysis and reconstruction of environments will be explored.
All this under wireless communications, looking for its direct application of 5G technology.
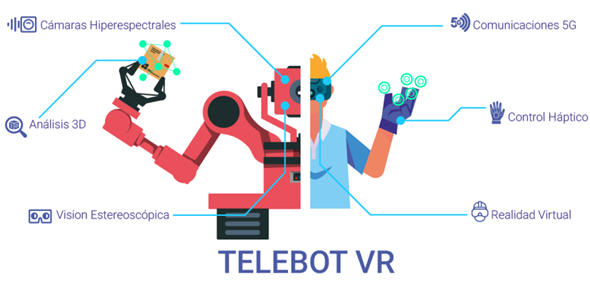
Figure 1. TELEBOT – VR project summary
TELEBOT VR Problem to be solved: Effective remote robot control in hazardous areas
Shortage of effective remote robot control systems in critical, high hazard environments, where direct human intervention is not advisable, in inspection tasks.
TELEBOT VR Objectives:
To overcome the current problems of remote operations on robots in highly dangerous or difficult to access environments, so that the operator controlling the robot remotely perceives the work environment as if he were performing the task himself directly. To achieve this, the system must allow the operator to perceive the various visual, auditory and tactile stimuli as if he were in the work scenario.
Consequently, high immersiveness and the possibility of operating at great distances are challenges that will achieve a technological breakthrough. Current and newly implemented (5G) communication networks allow sufficient communication rates to support the synchronization of the robotic system with the highly immersive control system. One of the objectives is to provide the possibility for the operator to maintain control over the robot thousands of kilometers away. That is, to allow a skilled operator to control equipment regardless of location.
TELEBOT VR duration
Septemeber 2020 – December 2022
Regional Individual Project financed by:



Contact person:
Javier Sedano, R&D Manager at ITCL – javier.sedano@itcl.es