
TELEBOT-VR – Nuevas tecnologías para Tele-Robots avanzados operados mediante interfaces de Realidad Virtual
TELEBOT-VR robot controlado a distancia con realidad virtual , sistemas hápticos y 5G para mejorar el control remoto de robots en entornos peligrosos. El proyecto busca ruperar las limitaciones actuales en operaciones remotas, proporcionando una experiencia inmersiva y segura.
¿Qué es TELEBOT-VR?
Tele-Robots Avanzados con Realidad Virtual
El proyecto trata de estrechar las distancias sensoriales que encuentra un operario al controlar un robot a distancia mediante interfaces de simulación y realidad virtual, y promover la visión y el control sobre los sistemas y articulaciones robóticas.
Robótica | Mantenimiento | Sistemas Remotos | Realidad Virtual | 5G | Infraestructuras Críticas | Sistemas Hápticos | Simulación | Industria4.0
Tecnologías Utilizadas en TELEBOT-VR
El proyecto explora varias líneas tecnológicas:
- Sistemas hápticos
- Técnicas de visión por ordenador y vSLAM
- Realidad virtual y realidad virtual inmersiva
- Sistema de cámaras esteroscópicas e hiperespectrales
- Reconstrucción 3D y tecnologías 5G para comunicaciones.
Por un lado, se pretende explorar el uso de la realidad virtual como método de interfaz inmersiva para el control de sistemas tele-robóticos y para la visualización remota del operario de forma altamente inmersiva.
Por otro lado, se explorará la aplicación de cámaras hiperespectrales para el análisis y reconstrucción de entornos.
Todo ello bajo comunicaciones inalámbricas, buscando su aplicación directa de la tecnología 5G.
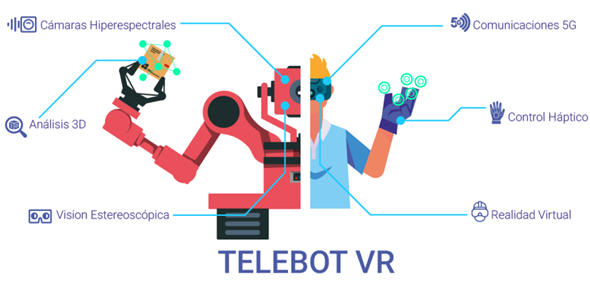
Figura 1. Resumen del proyecto TELEBOT – VR
Problema que pretenden resolver: Control remoto eficicaz de robots en entornos peligrosos
Escasez de sistemas remotos eficaces de control de robots en entornos críticos, de alta peligrosidad, donde no es recomendable inervención humana directa, en labores de inspección
Objetivos de TELEBOT-VR
Superar Limitaciones de Operaciones Remotas
Superar los problemas actuales de operaciones remotas sobre robots en entornos altamente peligrosos o de difícil acceso, de forma que el operario que controla el robot a distancia perciba el entorno de trabajo como si estuviera realizando la tarea él directamente. Para ello, se debe lograr que el sistema permita percibir los distintos estímulos visuales, auditivos y táctiles como si se encontrase en el escenario de trabajo.
Alta Inmersividad y Control a Grandes Distancias
En consecuencia, la alta inmersividad y la posibilidad de operar a grandes distancias, son retos que lograrán un gran avance tecnológico. Las redes de comunicaciones actuales y las de nueva implantación (5G) permiten tasas de comunicación suficientes para soportar la sincronización del sistema robótico con el sistema de control de alta inmersión. Uno de los objetivos es brindar la posibilidad al operario de mantener el control sobre el robot a miles de kilómetros de distancia. Es decir, permitir que un operario experto pueda gobernar equipos independientemente del lugar en que se encuentren.
Duración del Proyecto TELEBOT-VR
Septiembre 2020 – Diciembre 2022
Proyecto Individual Regional financiado por:



Persona de contacto:
Javier Sedano, Director I + D en ITCL – javier.sedano@itcl.es
Descubre más proyectos que integren Inteligencia Artificial y Deep Learning, contacta con nosotros y explora cómo estas tecnologías pueden transformar tu sector.