STC16 – Programación y Comunicación de un Brazo Robótico

DURACIÓN DEL CURSO:
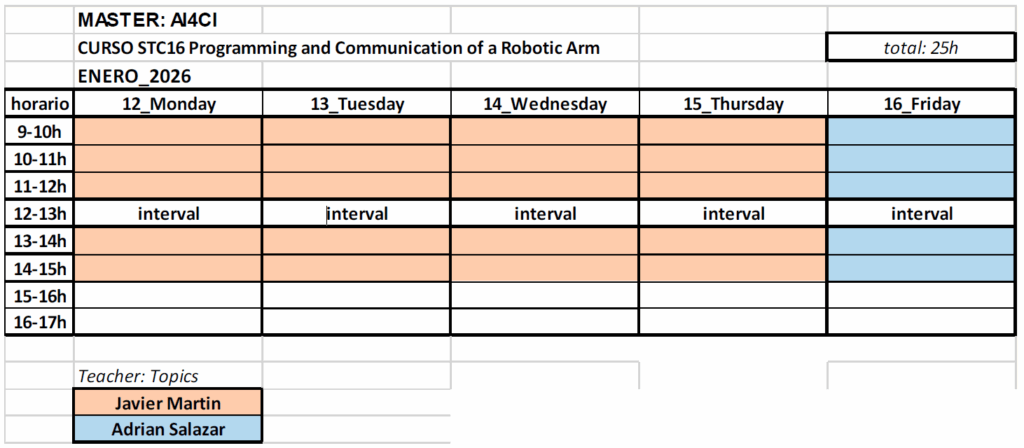
12–16 de enero de 2026
CRÉDITOS ECTS
3
HORARIO:
Horario de 9:00 a 12:00 y de 13:00 a 15:00
MODALIDADES:
Online o presencial en ITCL.
CONTENIDO PRINCIPAL:
Conocer los principios matemáticos que gobiernan el movimiento de un robot y aprender a aplicarlos en programas sencillos.
Aprender a programar trayectorias simples y corregir operaciones preprogramadas en un robot.
Conocer los diferentes tipos y niveles de comunicación que tiene un robot con su entorno.
Adquirir el conocimiento necesario para llevar a cabo comunicaciones de bajo nivel con sistemas sensorizados. Aprender a realizar comunicaciones con PLCs, por ejemplo Siemens.
PRERREQUISITOS:
- Fundamentos de robótica: conceptos básicos como cinemática y dinámica de brazos robóticos.
- Electrónica básica: resistencia, tensión, corriente y componentes electrónicos comunes.
- Programación: experiencia previa en Python o C++.
EVALUACIÓN:
- Cuestionarios y pruebas cortas de asimilación durante el curso: 50 %
- Proyecto final, individual o en grupo: 50 %
CONTENIDOS PRINCIPALES:
1. Principios Matemáticos y Mecánicos de la Operación de Robots
En esta sección, le enseñaremos los principales tipos de brazos robóticos articulados y sus diferencias clave. Estudiaremos los componentes principales de estos robots y los conceptos matemáticos que gobiernan su movimiento.
2. Lenguajes de Comunicación: Diferencias en la Programación entre Marcas
Esta parte cubrirá los paradigmas de comunicación más importantes utilizados para interconectar los controladores de robots con otros equipos industriales. Veremos cómo los robots se comunican con sus sistemas de control externos (PLCs y buses profibus, profinet, opc).
Discutiremos sus ventajas y desventajas, los tipos de industrias en los que se utilizan, y proporcionaremos ejemplos.
3. Programación de Bajo Nivel
a) Programación de Bajo Nivel para el Control de un Brazo Robótico
En esta sesión, nos centraremos en el control de un brazo robótico utilizando el lenguaje de programación industrial RAPID, que se usa en robots ABB. Los participantes aprenderán a crear rutinas básicas de movimiento, definir sistemas de coordenadas, e interactuar con el controlador del robot. Además, exploraremos cómo ejecutar movimientos punto a punto y manejar señales simples de entrada/salida,
b) Control de un Brazo Robótico con Python y ROS
En esta sesión, nos centraremos en el control de un brazo robótico utilizando el lenguaje de programación Python. Trasladaremos el conocimiento de la primera sesión a bibliotecas de Python para controlar una plataforma de brazo robótico en un entorno simulado usando Gazebo. También cubriremos los fundamentos de ROS (Robot Operating System) con brazos robóticos y lo compararemos con otros sistemas de robótica industrial.
CALENDARIO:
Curso intensivo en enero de 2026 (12 al 16), con sesiones de mañana y tarde según el horario semanal indicado en la tabla del documento
OBJETIVOS PEDAGÓGICOS
Aprender los principios teóricos y prácticos que gobiernan el movimiento de un robot y aplicarlos en programas sencillos empleados en la industria. Esto incluye:
- Programar trayectorias simples en un brazo robótico.
- Corregir secuencias preprogramadas usando herramientas industriales, tanto open-source como propietarias.
- Comprender las distintas estrategias de comunicación entre el robot y su entorno.
- Introducción a los fundamentos de visión por computador para realizar operaciones inteligentes con robots articulados.
MATERIAL NECESARIO:
Todo el hardware y software requeridos serán proporcionados durante el curso.
